Urbane sowie ländliche Szenarien stellen teil-, hoch- und vollständig automatisierte Fahrzeuge vor große Herausforderungen. Insbesondere die Vielzahl an unterschiedlichen, komplexen Umgebungen, Verkehrsteilnehmern und Umweltbedingungen erfordert eine genaue und zuverlässige Umfelderfassung durch die fahrzeuginternen Umfeldsensoren Kamera, LiDAR und Radar. Zusätzlich zum Einsatz für Fahrerassistenzsysteme und Systeme des automatisierten Fahrens kann die vorausschauende Umfeldwahrnehmung auch dazu verwendet werden, die Robustheit von Systemen der Passiven und Integralen Sicherheit weiter zu verbessern und ihre Funktionalität zu erweitern. Ist eine Kollision unvermeidlich, werden reversible und irreversible Sicherheitssysteme frühzeitig ausgelöst, um Verletzungen oder Todesfälle von allen Verkehrsteilnehmern zu vermindern bzw. zu vermeiden. Umfassende Anforderungen an die Umfeldwahrnehmung im Nahfeld wie minimale Fehlerquote und hohe Genauigkeit sind hierfür zwingend notwendig. Infolgedessen ist es essenziell, eine schnelle, zuverlässige und vertrauenswürdige Umfelderfassung in allen Verkehrssituationen zu realisieren. Herausforderungen liegen dabei unter anderem bei einer genauen und detaillierten Objekterkennung, der Minimierung von Zykluszeiten sowie der Absicherung der Umfelderkennung, wenn einzelne Sensoren beispielsweise durch Regen gestört werden.
Sichere Umfelderkennung

Umfeldsensorik
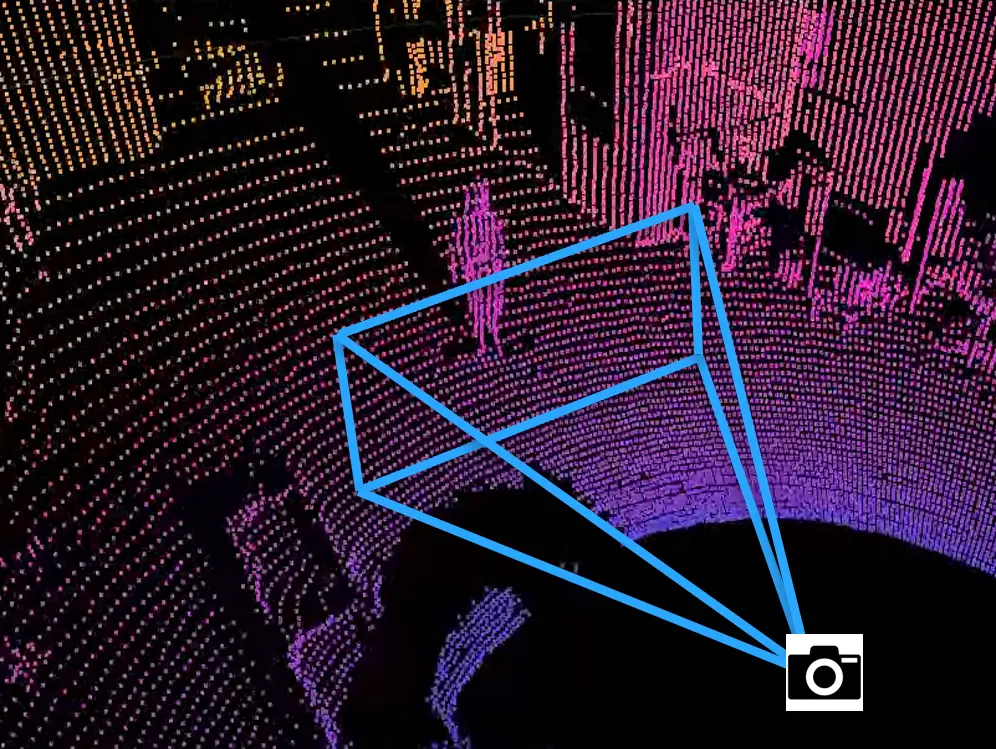
Mit Hilfe von Radar, Kamera und LiDAR können moderne Fahrzeuge das Umfeld des Fahrzeugs wahrnehmen. Alle drei Sensortechnologien arbeiten dabei mit unterschiedlichen Messprinzipien, wodurch sie unterschiedliche Stärken und Schwächen aufweisen. So ist der Radar beispielsweise robust gegenüber Witterungseinflüssen, die Objekterkennung kann aber durch Mehrfachreflektionen und hierdurch erzeugte Geisterobjekte gestört werden. Die Kamera ist unter anderem sehr gut geeignet für die Objektklassifikation, allerdings ist sie anfällig für Über- und Unterbelichtung, etwa bei tiefstehender Sonne. Der LiDAR ermöglicht beispielsweise eine genaue Abstandsmessung, wird jedoch gestört durch Witterung. C-ISAFE nutzt die spezifischen Eigenschaften und forscht an Methoden zur Verbesserung der Performance der einzelnen Sensoren sowie von Sensorsystemen. Der Fokus liegt hierbei auf der robusten und detaillierten Erkennung im Nahfeld für Fahrzeugsicherheitssysteme.
Detaillierte Objekterkennung in der Pre-Crash Phase
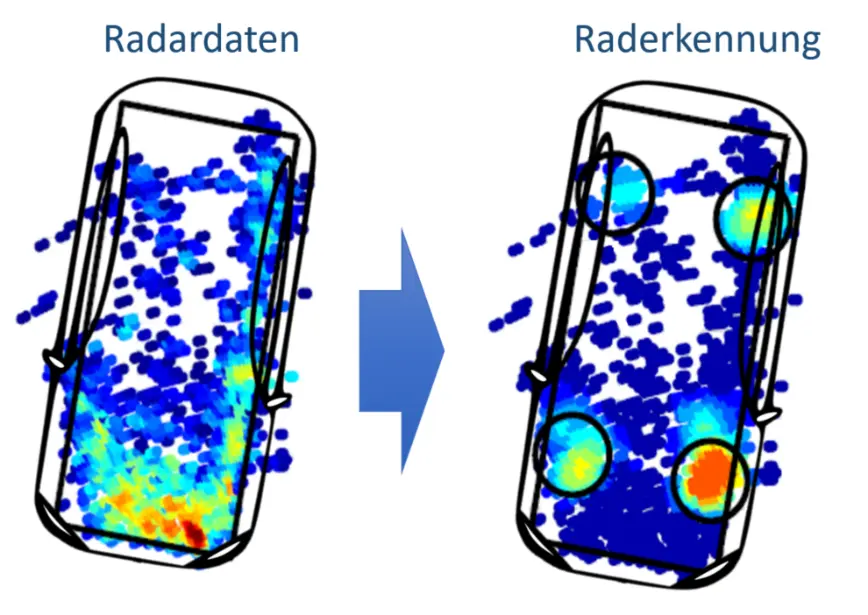
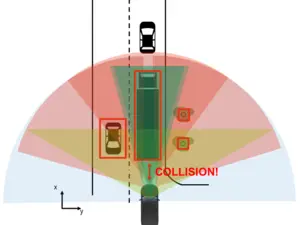
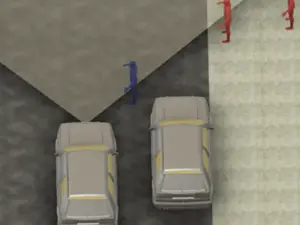
Die stetig steigende Auflösung und Performance von Umfeldsensoren ermöglicht eine fortschreitende Verbesserung der Objekterkennungsgüte und -details. Gerade in der Pre-Crash Phase, in der der Abstand von Sensoren und den potenziellen Kollisionsobjekten gering ist, können zusätzliche Informationen gesammelt und ausgewertet werden. Beispielsweise ist bei einem (potenziellen) Crash mit einem anderen Fahrzeug eine genaue Bestimmung relevanter Parameter wie Größe, Entfernung, Annäherungswinkel und Geschwindigkeit erforderlich, um eine sichere Prädiktion des Unfallgeschehens zu ermöglichen. Von besonderem Interesse sind Objektmerkmale, deren Position sich statisch innerhalb des Objekts befindet, z.B. die Position der Fahrzeugräder. Diese markanten Punkte ermöglichen eine sichere und genaue Objekterkennung und -verfolgung. In C-ISAFE wurde eine radarbasierte Methode entwickelt und patentiert, mit der die Position und Geschwindigkeit von rotierenden Fahrzeugrädern auf Basis des Mikro-Doppler Effekts ermittelt und getrackt werden können. Dieses Vorgehen der Ermittlung von markanten Teilbereichen eines Fahrzeuges wurde durch eine feature-basierte Extraktionsmethodik mittels eines KI-Verfahrens für die Kamerasensorik adaptiert und erweitert. Kombinatorisch können hieraus crashrelevante Objektparameter des Gesamtfahrzeugs bestimmt werden. Mittels LiDAR können ergänzende Informationen über die Geometrie von Objekten ermittelt werden, wie beispielsweise eine Konturbestimmung von Fahrzeugen. Neben der Erfassung von Fahrzeugen in Hinsicht auf Pkw-Pkw-Crashs werden weitere Verkehrsteilnehmer objektspezifisch betrachtet. Ein Schwerpunkt des Forscherteams liegt hierbei auch im Fußgängerschutz.
Robuste Objekterkennung

Um künftige Sicherheitssysteme durch vorausschauende Sensoren aktivieren zu können, muss das nahe Fahrzeugumfeld sicher und kontinuierlich erkannt werden. Zusätzlich stellt die Aktivierung von irreversiblen, passiven Sicherheitssystemen eine fahrsicherheitskritische Entscheidung dar und wird in der höchsten Absicherungsstufe eingeordnet. Neben der Entwicklung von sensorspezifischen Methoden ist ein Schwerpunkt des Forscherteams daher auch durch Sensorfusion die Objekterkennung, insbesondere hinsichtlich der Robustheit, zu verbessern. Mit Hilfe von KI-Algorithmen können Sensoren auf verschiedenen Ebenen fusioniert werden. Insbesondere wird in C-ISAFE eine Deep-Learning Architektur für eine frühe Fusion entwickelt, um die unterschiedlichen Wirkungen von Störgrößen auf die einzelnen Sensoren optimal berücksichtigen zu können. Aktuelle Forschungsthematik ist hierbei die Sicherheit unter widriger Witterung. Darüber hinaus werden zur Robustheits- und Sicherheitssteigerung Absicherungskonzepte und unabhängige Plausibilisierungsmethoden von vorausschauenden Sensoren entwickelt.
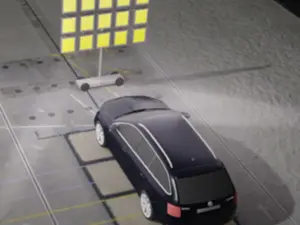
Knapp jeder sechste Unfall eines Personenkraftwagens mit verletzten Insassen weist trotz moderner ESP-Systeme ein Schleudern in der Pre-Crash Phase auf. Ursachen hierfür sind z. B. unkoordinierte Fahrereingriffe in sicherheitskritischen Fahrsituationen oder eine rutschige Fahrbahn durch Schnee und Eis. Schleudern stellt eine spezielle, nichtlineare Fahrzeugbewegung dar, welche stark von externen Umweltbedingungen abhängt, etwa dem Reibwert der Fahrbahnoberfläche.
In C-ISAFE werden neue Methoden der Objekterkennung und -verfolgung in kritischen Fahrsituationen wie Schleudern erforscht, diese in Prototypenfahrzeuge implementiert und unter realen Umweltbedingungen getestet.


Ausgewählte Publikationen
- P. Zaumseil, R. Engert, D. Zdetski, D. Steinhauser, U. Jumar, and T. Brandmeier, "Radar Signature of a Micro-Doppler generating Soft-Target for Automotive Pre-Crash Systems," 2023 20th European Radar Conference (EuRAD), Berlin, Germany, 2023, pp. 209-212, doi: 10.23919/EuRAD58043.2023.1028949.
- F. Sezgin, D. Vriesman, D. Steinhauser, R. Lugner, and T. Brandmeier, "Safe Autonomous Driving in Adverse Weather: Sensor Evaluation and Performance Monitoring," 2023 IEEE Intelligent Vehicles Symposium (IV), Anchorage, AK, USA, 2023, pp. 1-6, doi: 10.1109/IV55152.2023.10186596.
- D. Vriesman, A. B. Junior, A. Zimmer, and T. Brandmeier, "Multimodal Early Fusion of Automotive Sensors based on Autoencoder Network: An anchor-free approach for Vehicle 3D Detection," 2023 26th International Conference on Information Fusion (FUSION), Charleston, SC, USA, 2023, pp. 1-8, doi: 10.23919/FUSION52260.2023.10224140.
- M. Graf, D. Vriesman, und T. Brandmeier, “Testmethodik zur Untersuchung, Validierung und Absicherung von Störeinflüssen auf Umfeldsensoren durch Witterung unter reproduzierbaren Bedingungen”, 14. VDI-Tagung Fahrzeugsicherheit, Fahrzeugsicherheit im Kontext neuer, nachhaltiger Mobilitätskonzepte, S. 231-248, 2023, doi: 10.51202/9783181024263.
- R. Huber, K. Schneider, A. Wetzel, E. Neitzel, and T. Brandmeier, "Light Analysis for Optimized Object Detection with Cameras for Integrated Safety Systems," in 2022 International Conference on Electrical, Computer and Energy Technologies (ICECET), Prague, Czech Republic, 2022, pp. 1–6, doi: 10.1109/ICECET55527.2022.9872761.
- D. M. Mothershed, R. Lugner, S. Afraj, G. J. Sequeira, K. Schneider, T. Brandmeier, and V. Soloiu, "Comparison and Evaluation of Algorithms for LiDAR-Based Contour Estimation in Integrated Vehicle Safety," IEEE Trans. Intell. Transport. Syst., vol. 23, no. 5, pp. 3925–3942, 2022, doi: 10.1109/TITS.2020.3044753.
- A. Kamann, D. Steinhauser, F. Gruson, T. Brandmeier, and U. Schwarz, "Extended Object Tracking Using Spatially Resolved Micro-Doppler Signatures," IEEE Transactions on Intelligent Vehicles, vol. 6, no. 3, pp. 440–449, 2020, doi: 10.1109/TIV.2020.3035433.
- D. Vriesman, M. E. Pederiva, J. Mario De Martino, A. B. Junior, A. Zimmer, and T. Brandmeier, "A Fusion Approach for Pre-Crash Scenarios based on Lidar and Camera Sensors," in 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 2021, pp. 1–5, doi: 10.1109/VTC2021-Spring51267.2021.9449039.
- G. J. Sequeira, B. Harlapur, D. O. Ortegon, R. Lugner, T. Brandmeier, and V. Soloiu, "Investigation of Influence from Variation in Color on LiDAR Sensor for Perception of Environment in Autonomous Vehicles," in 2021 International Symposium ELMAR, 2021, Zadar, Croatia, pp. 71–76, doi: 10.1109/ELMAR52657.2021.9550943.
- P. Held, D. Steinhauser, A. Koch, T. Brandmeier, and U. T. Schwarz, "A Novel Approach for Model Based Pedestrian Tracking Using Automotive Radar," IEEE Trans. Intell. Transport. Syst., vol. 23, no. 7, pp. 7082–7095, 2022, doi: 10.1109/TITS.2021.3066680.
- G. J. Sequeira, M. Surve, S. Afraj, and T. Brandmeier, “A novel concept for validation of pre-crash perception sensor information using contact sensor,” in 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 2020, pp. 1-7, doi: 10.1109/ITSC45102.2020.9294242.
- G. J. Sequeira, S. Afraj, M. Surve, and T. Brandmeier, “LiDAR point cloud analysis for vehicle contour estimation using polynomial approximation and curvature breakdown,” in 2020 IEEE 92nd Vehicular Technology Conference (VTC2020-Fall), Victoria, BC, Canada, 2020, pp. 1-6, doi: 10.1109/VTC2020-Fall49728.2020.9348457.
- R. Lugner, D. Vriesman, M. Inderst, G. J. Sequeira, N. Pasupuleti, A. Zimmer, and T. Brandmeier, “Evaluation of Sensor Tolerances and Inevitability for Pre-Crash Safety Systems in Real Case Scenarios,” in 2020 IEEE 3rd Connected and Automated Vehicles Symposium (CAVS), Victoria, BC, Canada, 2020, pp. 1-6, doi: 10.1109/CAVS51000.2020.9334578.
- D. Vriesman, B. Thoresz, D. Steinhauser, A. Zimmer, A. Britto, and T. Brandmeier, "An Experimental Analysis of Rain Interference on Detection and Ranging Sensors," in 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 2020, pp. 1-5, doi: 10.1109/ITSC45102.2020.9294505.
- P. Held, D. Steinhauser, A. Kamann, A. Koch, T. Brandmeier, and U. T. Schwarz, “Normalization of Micro-Doppler Spectra for Cyclists Using High-Resolution Projection Technique,” in 2019 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Cairo, Egypt, 2019, pp. 1-6, doi: 10.1109/ICVES.2019.8906495.
- K. Schneider, R. Lugner, and T. Brandmeier, “LiDAR-Based Contour Estimation of Oncoming Vehicles in Pre-Crash Scenarios,” in 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 2019, pp. 2272-2277, doi: 10.1109/IVS.2019.8813825.
- P. Zaumseil, D. Steinhauser, P. Held, A. Kamann, and T. Brandmeier, “Radar-based Near Field Environment Perception using Back Projection Algorithm,” in 2019 16th European Radar Conference (EuRAD), Paris, France, 2019, pp. 257-260, Paris, France.
- G. J. Sequeira, S. Afraj, R. Lugner, and T. Brandmeier, “LiDAR Based Prediction and Contact Based Validation of Crash Parameters for a Preemptive Restraint Strategy,” in IEEE International Conference of Vehicular Electronics and Safety (ICVES), Cairo, Egypt, 2019, pp. 1-7, doi: 10.1109/ICVES.2019.8906354.
- P. Held, D. Steinhauser, A. Kamann, A. Koch, T. Brandmeier, and U. T. Schwarz, "Micro-Doppler Extraction of Bicycle Pedaling Movements Using Automotive Radar," in 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 2019, pp. 744-749, doi: 10.1109/IVS.2019.8813828.
- G. J. Sequeira, K. Schneider, R. Lugner, and T. Brandmeier, “Concepts for Validation Sensor for Pre-Crash Information from Forward-Looking Sensors,” in Sensors and Measuring Systems; 19th ITG/GMA-Symposium, Nuremburg, Germany, 2018, pp. 1-5.
- A. Kamann, P. Held, F. Perras, P. Zaumseil, T. Brandmeier, and U. T. Schwarz, “Automotive Radar Multipath Propagation in Uncertain Environments,” in 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 2018, pp. 859-864, doi: 10.1109/ITSC.2018.8570016.
Ansprechpartner

Prof. Dr.-Ing. Thomas Brandmeier
Tel.: +49 841 9348-3840
Raum: H023
E-Mail: Thomas.Brandmeier@thi.de

Dr. rer. nat. Dagmar Steinhauser
Tel.: +49 841 9348-3375
Raum: H120
Fax: +49 841 9348-993375
E-Mail: Dagmar.Steinhauser@carissma.eu