Ungefähr die Hälfte der Verkehrstoten weltweit sind ungeschützte Verkehrsteilnehmer (Vulnerable Road Users, VRUs) wie Fußgänger oder Radfahrer. VRUs sind im Straßenverkehr bei einer Kollision mit einem Fahrzeug immer der schwächere Kollisionspartner. Für die Realisierung des sicheren autonomen Fahrens ist die sichere Erkennung und Klassifikation von VRUs und die Verhinderung von Unfällen unabdingbar. VRUs besitzen meist ein hohes Maß an Freiheitsgraden in Bezug auf deren Bewegungsmöglichkeiten, was ihnen die plötzliche Änderung des Bewegungsverhaltens erlaubt. Dies stellt Sicherheitssysteme bezüglich der Erfassung und Interpretation der Situationen der Bewertung der Situationskritikalität vor eine große Herausforderung. Folglich ist die Verbesserung von Sicherheitssystemen, die gezielt das Bewegungsverhalten von Fußgängern detektieren und analysieren, ein wesentlicher Bestandteil aktueller Entwicklungen und Euro NCAP-Testszenarien. C‑ISAFE forscht daher an Algorithmen, um das Verhalten von VRUs aus Sensorsignalen zu extrahieren und mit eigens entwickelten VRU-Attrappen nachstellen zu können.
Fußgängerschutz
Fußgängererkennung

Fußgänger besitzen die Möglichkeit, schnell und unvorhersehbar Richtung und Geschwindigkeit zu ändern und plötzlich auf die Straße zu treten. Dabei besitzen insbesondere Kinder bis zum Grundschulalter ein großes Gefahrenpotenzial. Neben gefährdendem Verhalten, wie das Spielen am Straßenrand oder nicht bekannte Verkehrsregeln, spielt auch die noch nicht abgeschlossene körperliche Entwicklung eine entscheidende Rolle. So können z. B. herannähernde Fahrzeuge nur schlecht eingeschätzt werden. Zudem sind sie aufgrund ihrer geringen Körpergröße für die Sensorik hinter Fahrzeugen fast nicht zu erkennen und werden somit noch später beim Heraustreten zwischen Fahrzeugen erkannt.
Daher ist es für die Umsetzung des automatisierten Fahrens in urbanen Szenarien von besonderer Bedeutung, Fußgänger unabhängig vom Alter sicher zu detektieren, die Situation zu verstehen und Absichten deuten zu können. In C-ISAFE werden hierzu radar- und kamerabasierte Methoden untersucht und entwickelt, um die robuste und schnelle Erfassung von Fußgängern zu realisieren. Eingesetzt werden hierbei hochauflösende Sensoren für das Nahfeld. Durch Auswertung des Mikrodoppler-Effekts (Geschwindigkeitsverteilung durch Bewegungen der Extremitäten) sowie hochauflösender Abstandsinformationen können zusätzlich zur verfeinerten Erkennung auch wichtige Erkenntnisse zum Verhalten des Fußgängers gewonnen werden. C-ISAFE hat hierzu patentierte Verfahren entwickelt, um das Mikro-Doppler-Profil von VRU in die Algorithmik zur Erkennung und Verhaltensintention zu interpretieren. Es werden Frühindikatoren untersucht, um rechtzeitig eine Änderung des Bewegungsablaufs (z. B. eine Richtungsänderung) zu registrieren. Darauf aufbauend werden Methoden entwickelt, um diese in eine Pfadprädiktion mit einzubeziehen. Bisher werden solche Pfadprädiktionen hauptsächlich auf nur einem Umfeldsensor aufbauend erstellt. Für eine bestmögliche Erkennung von Fußgängern werden daher in C-ISAFE Methoden zur Verbindung sich ergänzender Sensoren, wie Kamera und Radar, untersucht. Über die Fusion beider Sensoren mit Hilfe von KI-Methoden sollen deren Vorteile genutzt sowie eine hohe Robustheit gegenüber schlechten Witterungsbedingungen wie Regen oder Nebel erreicht werden.
Attrappen

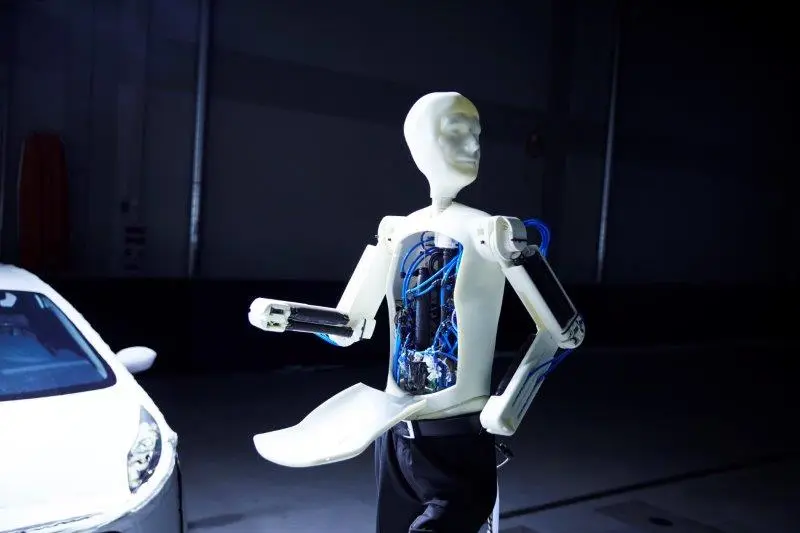
Die Entwicklung sicherer Fahrzeuge und neuer Fahrfunktionen erfordert eine gezielte Nachstellung kritischer und gefährlicher Verkehrssituationen. Eine Fußgängerattrappe imitiert neben dem Aussehen eines Menschen auch seine Bewegungen und ermöglicht die gefahrlose Nachstellung von kritischen Verkehrssituationen. Durch die fortschreitenden Entwicklungen im Bereich des automatisierten Fahrens, ausgehend von der Sensorhardware über die Erkennungs- und Interpretationsalgorithmik bis hin zur Fahrfunktion, steigen die Anforderungen an eine Attrappe. Die Herausforderung ist hierbei, die charakteristischen Merkmale und Bewegungen von Fußgängern aus der Sicht der automobilen Umfeldsensoren durch ein Testsystem hinreichend realitätsnah abzubilden. Die Entwicklung solcher Attrappen und zugehöriger Testmethoden ist ein Forschungsschwerpunkt von C-ISAFE. Um verschiedene Gangarten und Bewegungsabläufe realistischer als bereits verfügbare Attrappen nachstellen zu können, wird am Institut eine neue Generation von Fußgängerattrappen (ArChi – Artificial Child und PAdDy – Pedestrian Adult Dummy) entwickelt. Diese werden von pneumatischen Muskeln (vergleichbar mit menschlichen Muskeln) angetrieben und ermöglichen ein realitätsnahes Bewegungsverhalten. Neben der Beinbewegung werden auch Arm- und Kopfbewegungen simuliert. Auf metallische Bauteile wird dabei komplett verzichtet, um eine realistische Radarsignatur zu ermöglichen und Beschädigungen bei möglichen Kollisionen mit Versuchsfahrzeugen zu reduzieren. Für die Bewegung der Fußgängerattrappen in der Indoor-Versuchsanlage stehen verschiedene Lösungen zur Verfügung, die unterschiedliche komplexe Testszenarien ermöglichen.
VRU-Verhaltensanalyse
C-ISAFE hat zur genaueren Analyse des Fußgängerverhaltens einen Fußgängersimulator aufgebaut, mit dem es möglich ist, das Verhalten und typische Bewegungsmuster von Fußgängern im Straßenverkehr zu analysieren und in die Entwicklung von Systemen für die integrale Sicherheit und Testmethoden zu integrieren. Genutzt wird dafür ein Head-Mounted Display (HMD) und ein Motion Capture System. Die Bewegungen des Probanden können so in eine Simulationsumgebung übertragen werden, welche der Proband durch das HMD sieht. Durch die Sicht auf den eigenen (simulierten und) bewegten Körper wird ein möglichst hoher Realitätsgrad erreicht.
Untersuchungen reichen von dem Verhalten beim Kreuzen einer Straße und der Analyse der sogenannten Lückenakzeptanz bis hin zur Körperhaltung beim Kreuzen zur Optimierung von Simulationsmethoden für Verletzungsmechanismen. Insbesondere wurde das Bewegungsverhalten von Kindern in verschiedenen Szenarien beim Überqueren der Fahrbahn aufgenommen und analysiert. Diese Bewegungsanalyse bildet die wissenschaftlich fundierte Entwicklungsgrundlage für die am C-ISAFE entwickelte Kinderattrappe.
Anwendungsbeispiele
- Studien zur Fußgängererkennung von Umfeldsensoren
- Fahr- und Ausweichversuche mit Fahrradfahrern
- Untersuchung der Objekterkennung mit Umfeldsensoren bis zum Crashpunkt


Ausgewählte Publikationen
- M. Book, R. Lugner, und T. Brandmeier, “Relevanz von Bewegungsmodellen für Entwicklungen im Bereich des vorausschauenden Passiven Fußgängerschutzes”, 14. VDI-Tagung Fahrzeugsicherheit, Fahrzeugsicherheit im Kontext neuer, nachhaltiger Mobilitätskonzepte, S. 325-338, 2023, doi: 10.51202/9783181024263.
- P. Held, D. Steinhauser, A. Koch, T. Brandmeier, and U. T. Schwarz, "A Novel Approach for Model-Based Pedestrian Tracking Using Automotive Radar," in IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 7, pp. 7082-7095, 2022, doi: 10.1109/TITS.2021.3066680.
- F. Sezgin, D. Vriesman, P. Held, A. Zimmer, and T. Brandmeier, "A Deep Learning Approach for Pedestrian Behavior Interpretation Based on Radar Point Clouds," 2021 18th European Radar Conference (EuRAD), 2022, pp. 66-69, doi: 10.23919/EuRAD50154.2022.9784515.
- D. Steinhauser, P. Held, B. Thöresz, and T. Brandmeier, "Towards Safe Autonomous Driving: Challenges of Pedestrian Detection in Rain with Automotive Radar," 2020 17th European Radar Conference (EuRAD), Utrecht, Netherlands, 2021, pp. 409-412, doi: 10.1109/EuRAD48048.2021.00110.
- P. Held, D. Steinhauser, A. Kamann, A. Koch, T. Brandmeier, and U. T. Schwarz, "Micro-Doppler Extraction of Bicycle Pedaling Movements Using Automotive Radar," 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 2019, pp. 744-749, doi: 10.1109/IVS.2019.8813828.
- P. Held, D. Steinhauser, A. Kamann, A. Koch, T. Brandmeier, and U. T. Schwarz, "Normalization of Micro-Doppler Spectra for Cyclists Using High-Resolution Projection Technique," 2019 IEEE International Conference on Vehicular Electronics and Safety (ICVES), Cairo, Egypt, 2019, pp. 1-6, doi: 10.1109/ICVES.2019.8906495.
- D. Steinhauser, P. HeId, A. Kamann, A. Koch, and T. Brandmeier, "Micro-Doppler Extraction of Pedestrian Limbs for High Resolution Automotive Radar," 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 2019, pp. 764-769, doi: 10.1109/IVS.2019.8813850.
- P. Held, D. Steinhauser, A. Kamann, T. Holdgrun, I. Doric, A. Koch, and T. Brandmeier, "Radar-Based Analysis of Pedestrian Micro-Doppler Signatures Using Motion Capture Sensors," in 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 2018, pp. 787-793, doi: 10.1109/IVS.2018.8500656.
- T. Holdgrün, I. Doric, T. Brandmeier, T. Fuchs, J. Mihlbauer, P. Steinert, S. Peldschus, "A Virtual Reality based Approach for Researching Pedestrian to Vehicle Collisions," in 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 2018, pp. 1318-1325, doi: 10.1109/IVS.2018.8500524.
Ansprechpartner

Prof. Dr.-Ing. Thomas Brandmeier
Tel.: +49 841 9348-3840
Raum: H023
E-Mail: Thomas.Brandmeier@thi.de