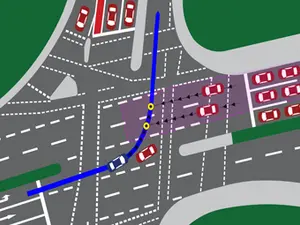
Eine präzise Positionierung von Verkehrsobjekten ist für Funktionen der integralen Sicherheit von zentraler Bedeutung. Einerseits ist eine Referenzsensorik zur Lokalisierung in der Entwicklungs- und Testphase notwendig, um Sensordaten zu validieren. Andererseits wird eine genaue Positionsbestimmung der Fahrzeuge im Straßenverkehr gerade im Zusammenhang mit den Herausforderungen des automatisierten Fahrens benötigt.
Positionierung und Umfeldsensorik

Abgeschlossene Projekte
- Hochpräzise und schnelle Ortung dynamischer Verkehrsobjekte
Veröffentlichungen
2021
- E. Sánchez Morales, Julian Dauth, M. Botsch, B. Huber and A. García Higuera, "HIGH PRECISION OUTDOOR AND INDOOR REFERENCE STATE ESTIMATION FOR TESTING AUTONOMOUS VEHICLES", Sensors, 2021
2020
- E. Sánchez Morales, F. Kruber, M. Botsch, B. Huber and A. García Higuera, "Accuracy Characterization of the Vehicle State Estimation from Aerial Imagery", IEEE Intelligent Vehicles Symposium, Las Vegas, 2020
2019
- E. Sánchez Morales, R. Membarth, A. Gaull, P. Slusallek, T. Dirndorfer, A. Kammenhuber, C. Lauer, and M. Botsch, “Parallel Multi-Hypothesis Algorithm for Criticality Estimation in Traffic and Collision Avoidance”, IEEE Intelligent Vehicles Symposium, Paris, 2019.
- E. Sánchez Morales, M. Botsch, B. Huber and A. García Higuera, “High precision indoor positioning by means of LiDAR”, DGON Inertial Sensors and Systems (ISS) Symposium Gyro Technology, Braunschweig, Germany, 2019.
- E. Sánchez Morales, M. Botsch, B. Huber and A. García Higuera, “High Precision Indoor Navigation for Autonomous Vehicles", International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 2019.
2018
V. Canas, E. Sánchez Morales, M. Botsch, and A. Garcia Higuera, “Wireless Communication System for the Validation of Autonomous Driving Functions on Full-Scale Vehicles”, IEEE International Conference on Vehicular Electronics and Safety, 2018.