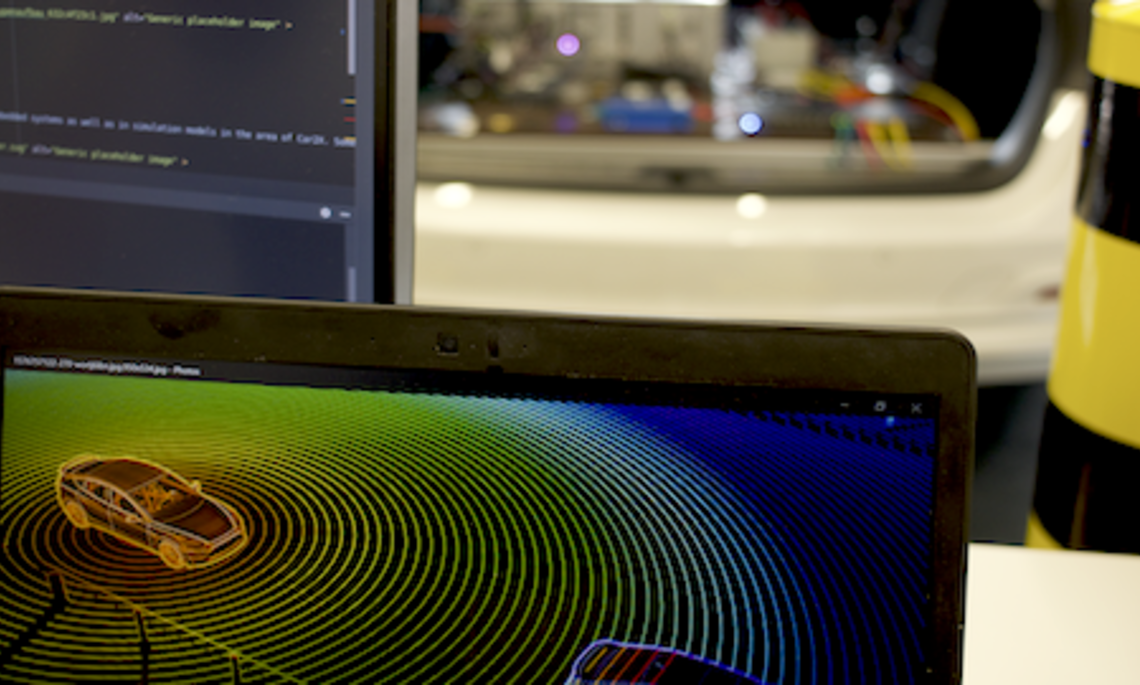
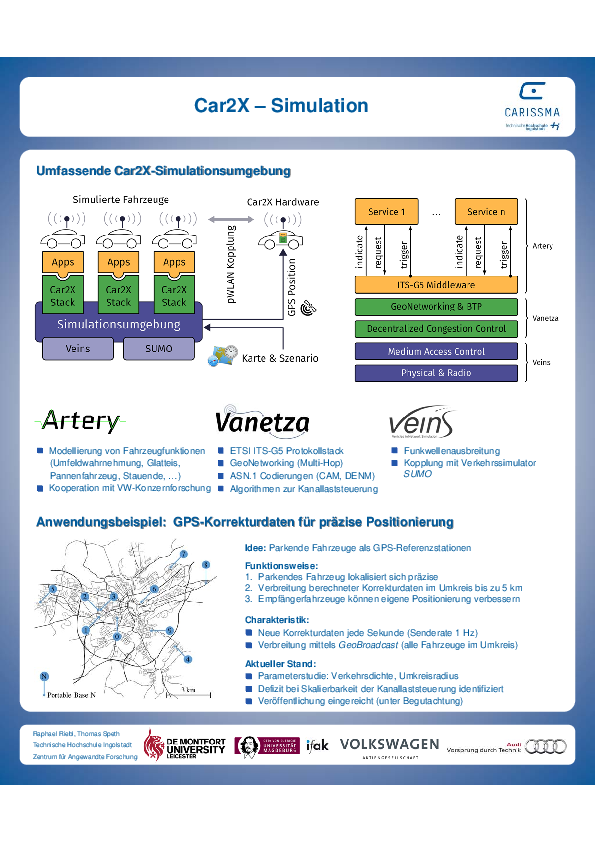
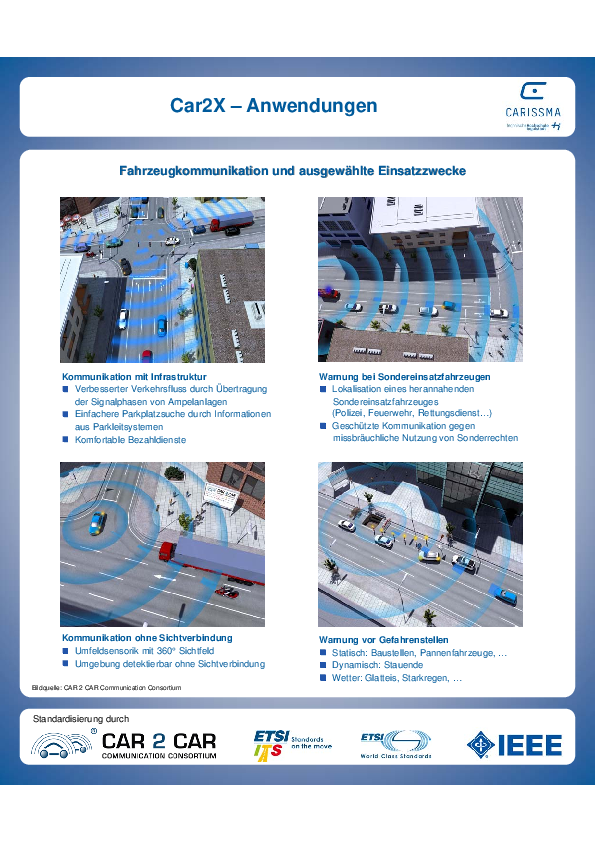
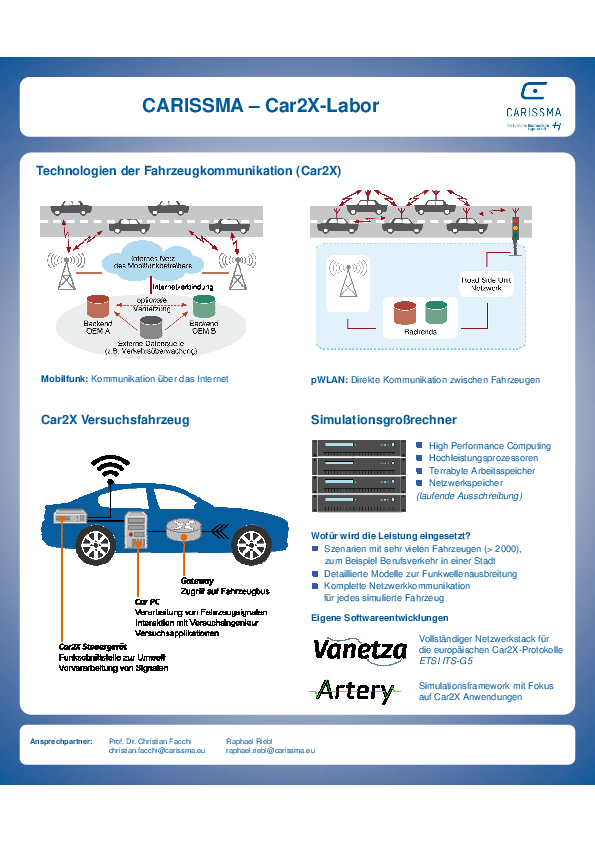
Es wird erwartet, dass die Car2X Kommunikation die Fahrzeugsicherheit, die Verkehrseffizienz und den Fahrkomfort nachhaltig verbessern kann. Mit WLAN-V2X und Cellular-V2X stehen zwei Kommunikationstechnologien zur Kommunikation zwischen Fahrzeugen sowie mit der Verkehrsinfrastruktur zur Verfügung. Neben Anwendungen für Fahrerinformationen und –warnungen werden zunehmend Use Cases zur Kommunikationsunterstützung für die Fahrzeugautomatisierung betrachtet, die massive Sensorinformationen zur kooperativen Umfeldwahrnehmung und anderen Use Cases übertragen. Darüber hinaus erfolgt eine zunehmende Einbeziehung von aller Verkehrsteilnehmer (Fußgänger, Fahrradfahrer).
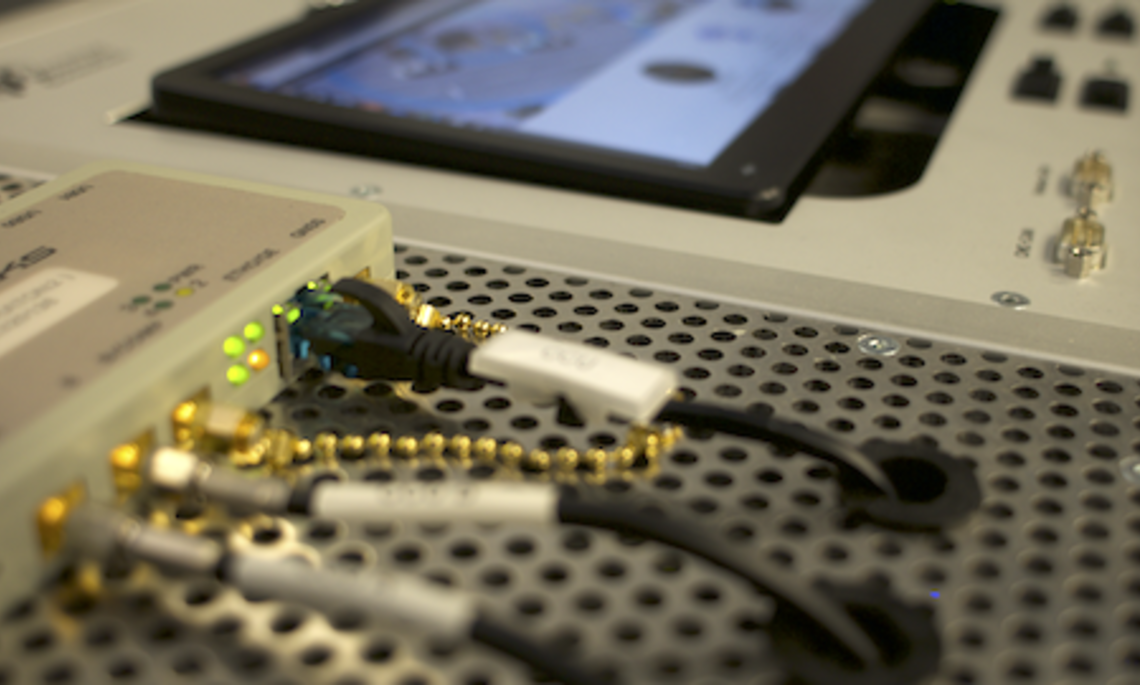
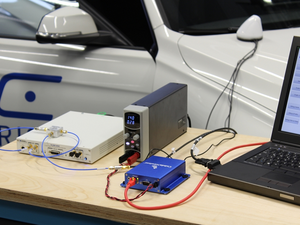
Für die Bewertung und Optimierung von Car2X-Kommunikationssystemen können Untersuchungen in sich ergänzenden Testumgebungen durchgeführt werden, wobei Simulationen, HIL-Prüfstände und Realversuche zum Einsatz kommen. Die Simulation erlaubt die breite Untersuchung von Use Cases und Protokollen auf leistungsstarken Rechenclustern. Damit können bspw. Car2X-Anwendungen simulativ abgesichert werden. In HIL-Umgebungen kann die Performanz experimenteller Prototypen für Car2X-Plattformen getestet werden. Bei Realversuchen werden Car2X-Plattformen mit der Sensorik in das Fahrzeug oder in Roadside Units integriert und in einem Testfeld unter kontrollierten Bedingungen oder auch im realen Straßenverkehr erprobt.