 Steuerung von Drohnen mit Hilfe von Mixed-Reality-Brillen.
Steuerung von Drohnen mit Hilfe von Mixed-Reality-Brillen.Human-Machine Teaming
 A320 Cockpitsimulator zur Evaluierung von Pilotenassistenzsystemen.
A320 Cockpitsimulator zur Evaluierung von Pilotenassistenzsystemen.Human-Machine Interaction
 Netzwerke von Drohnen
Netzwerke von DrohnenUAV Coordination & Swarming
 Visualisierung einer Formation von Drohnen
Visualisierung einer Formation von DrohnenUAV Coordination & Swarming 2
 Technologietransferzentrum Unbemannte Flugsysteme
Technologietransferzentrum Unbemannte FlugsystemeTechnologietransferzentrum Unbemannte Flugsysteme in Manching
Current advancements in civil and military applications underscore the growing importance of unmanned aerial systems (UAS) for mobility and security purposes.
At TTZ, our focus lies in developing innovative concepts for next-generation unmanned platforms, enabling intelligent UAV swarm control, and enhancing operator interaction with highly automated UAV systems.
Current Research areas
We are working on the development of new concepts for unmanned aerial systems and the operational analysis of the application of UAVs in logistics and mobility.
Project: Control and regulation of a innovative propulsion system
In this research project, we are investigating a single-rotor platform concept with VTOL characteristics. The aim is to develop an AI-based control system to stabilise the system by selectively disturbing the centre of gravity.
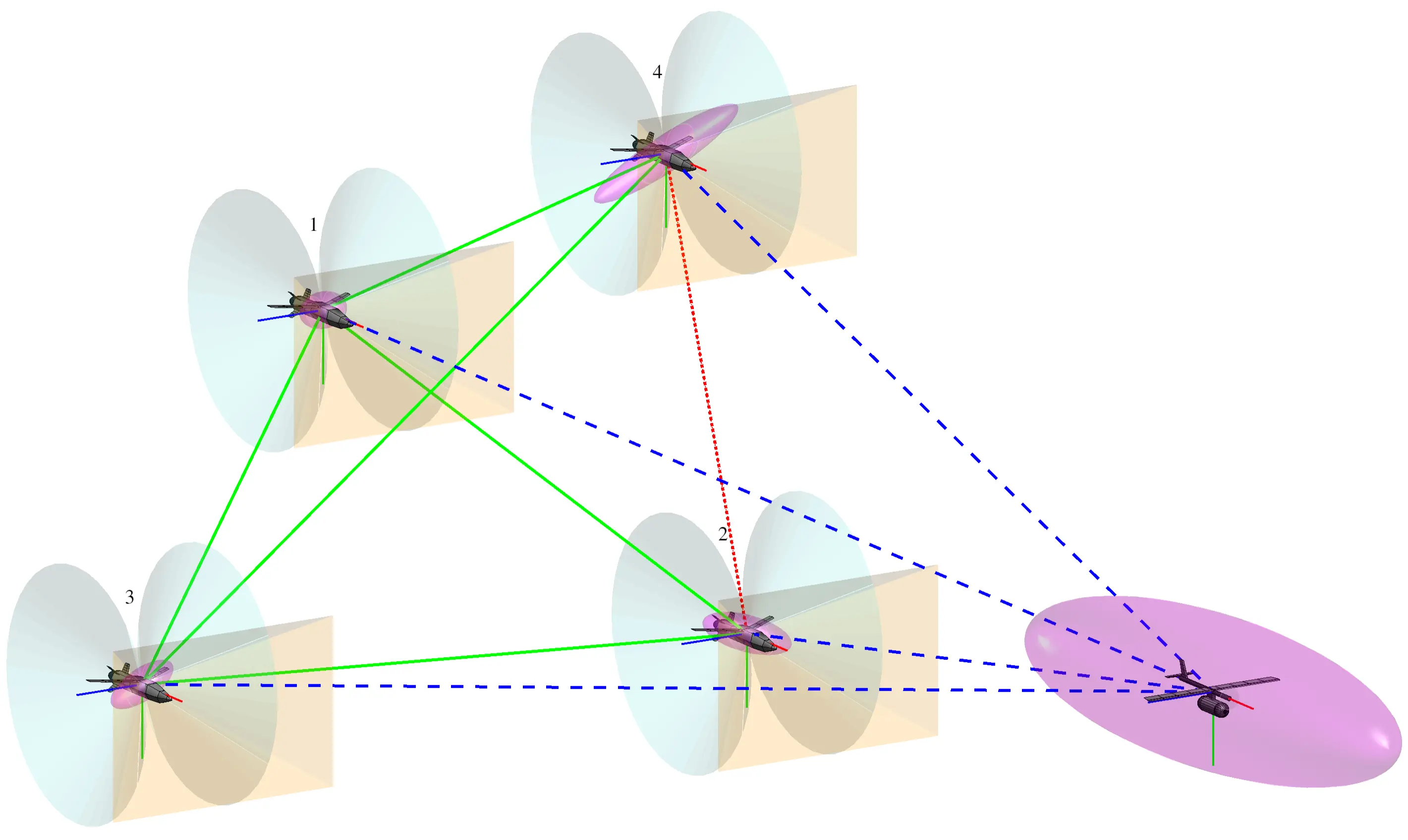

In this research area, we focus on the development of methods and algorithms for the control of swarms of unmanned aerial vehicles (UAVs). The use of UAVs in swarms offers many opportunities in terms of scalability, mission performance and flexibility. The aim of our projects is the implementation of intelligent formation behaviour for the use of swarms in safety-relevant applications. This involves the use of control engineering and machine learning methods, e.g. for state estimation or path planning.
Project: Intelligent drone coordination for efficient automated air logistics (IDEALS)
In the IDEALS study, operational investigations were carried out into the use of UAV swarms in logistics. The aim was to identify technical requirements and analyse operational boundary conditions and feasibility.
Steering large-scale particle or robot systems presents a significant challenge due to their high dimensionality. Instead of relying on decentralized methods, we employ a centralized stochastic approach that enables optimal control with a single coordinating element.
While many previous works assume fully actuated robots, our approach focuses on underactuated systems, prioritizing energy-efficient control.
By leveraging a generalized coordinate transformation based on Euler-Lagrange systems, we account for the physical properties of the robots. Our method effectively gathers and directs robots toward a goal while minimizing positional variance within a bounded, obstacle-free area. Through advanced optimal control mechanisms, we demonstrate the feasibility of our approach in simulations, paving the way for more efficient and scalable robotic systems.

Technological advancements in UAV automation are transforming how UAVs are controlled. Traditional manual operation is increasingly being replaced by highly automated systems, including integration with manned platforms in Manned-Unmanned Teaming (MUM-T) applications.
This shift calls for innovative interaction concepts that facilitate seamless collaboration between human operators and autonomous systems, ensuring effective mission execution.
The Human-Autonomy Teaming & Interaction research group explores these concepts through simulations and real-world flight tests.
Their focus is on enhancing mission performance, improving transparency, and strengthening situational awareness when working with intelligent software systems.


![[Translate to English:] Logo Akkreditierungsrat: Systemakkreditiert](/fileadmin/_processed_/2/8/csm_AR-Siegel_Systemakkreditierung_bc4ea3377d.webp)



![[Translate to English:] Logo IHK Ausbildungsbetrieb 2023](/fileadmin/_processed_/6/0/csm_IHK_Ausbildungsbetrieb_digital_2023_6850f47537.webp)